
 中国官网
中国官网 美国官网
美国官网 日本官网
日本官网在水力发电站运行过程中,水库中的水经过一条高差较大的引水道竖井或者斜井来获得较大流速,推动引水道底端的发电机组工作。引水道在水流不断冲刷的过程中,存在混凝土冲蚀的风险,轻则造成非正常停机检修,重则造成机组水轮机及流道损毁,影响整个水电站引水发电系统运行,进而危及水电站大坝下游数百万群众和下游城市的存亡,造成不可估量的后果。对引水道进行病害缺陷检测,研判病害缺陷的发展趋势,成为大型水电站安全稳定运行的“重中之重”。

01
无人机检测竖井优缺点
对于垂直落差大的引水道竖井段,人员无法直接到达,脚手架搭设检查,资金投入大、作业风险高,工期长不可行,目前尚未有水电站对其开展过系统性的检查工作,无法全面掌握竖井混凝土表面病害情况,在国际上属于检测“盲区”。
面对竖井病害检测难题,我们采取了利用无人机获取图像数据的方式,获取速度快、质量稳定,基于数字图像处理手段,自动检测竖井病害。
无人机检测竖井优势:
-
无盲区
无人机可采集人工无法到达部位的影像数据。
-
施工速度快且前期准备简单
和传统的人工检测及仪器检测相比,无人机检测用时大大缩短,从数据采集到成果展现仅需3-5天,无需搭建脚手架等辅助设备,减少检测成本投入。
-
具有较高的安全性
无人机在无GPS信号情况下的姿态和飞行仍十分稳定,替代人工检查的方式,具有较高的安全性。
-
方案具有可移植性和推广性
无人机检测的技术容易掌握,软件操作简单,可以快速进行复制和转移推广应用,对其它类似工程具有较强的借鉴和推广价值。
-
检查成果直观形象
无人机检测的成果指标包括影像、视频、三维模型等,与现有技术指标相比更加直观、可查询、可追溯。

Falcon 8 无人机在竖井内部飞行
无人机检测竖井劣势:
-
飞手站位选择困难
竖井内检测面较高,且飞手站立位置较低,随着飞手与无人机的距离加大,人的视线误差也会随之加大,哪怕无人机具有防撞装置也比较危险。
-
无平稳地面起飞点
竖井内站立平面较窄,较大无人机无法在平面上放置,只能采取人工搭建的方式,危险度较高。
-
内部光线昏暗,不易影像获取后分析
竖井内整体光线较暗,如果不做任何调整,后期获取的影像很难进行辨析。如果只通过相机的自身调整进行加大曝光等措施会使得影像发生畸变,增加噪点等影响影像质量。
02
无人机设备采用
猎鹰8多旋翼无人机

机身自重:940g
任务载荷:1200g
最大起飞重量:2.2kg
航行时间:20min
飞行高度:1000m
飞行半径:1000m
环境风力:≤6级
-
SonyA7R 3600w全画幅相机
-
上下180°可旋转云台
-
31个传感器,极高安全性
-
抗六级风、抗磁干扰,超强稳定性
-
高清图传系统
-
起飞重量只有2.2kg,便携易操作
03
无人机检测竖井前准备
-
测试抗环境干扰性
竖井内部磁场干扰较大,无人机的传感器元件需要在磁干扰环境下稳定工作,保证无人机的稳定性,避免失控。为了保证检查工作的顺利需要对无人机进行检查前抗环境干扰力测试。
-
无人机试飞
在无GPS信号及周围完全黑暗的条件下无人机进行安全飞行。需要进行试飞行,以便确定之后检查工作计划的制定。
-
无人机飞行安全保护准备
竖井结构并不是直上直下的圆柱体,有的垂直段为蜗壳式结构,并且竖井的直径一般在20米内,相对较窄,加上黑暗的环境,并不能保证无人机在竖井内部进行飞行的过程中不与内壁发生碰撞。假如发生了碰撞,对无人机以及竖井内壁都会造成或大或小的损坏。因此在无人机安全方面需要对增加螺旋桨保护装置,确保无人机在飞行的过程中的安全。
-
飞行环境补光
为了使飞手可以对无人机进行定位,辨别无人机与其周围障碍物的相对位置关系,对竖井环境补光是整个检查中必要的一环。
-
相机补光
为了使获取的影像足够清晰明亮,需要对相机视野范围进行额外补光。如果只通过相机的自身调整进行加大曝光等措施会使得影像发生畸变,增加噪点等影响影像质量。
-
选择成像效果好的相机
无人机对竖井内部进行检查的主要检查数据就是无人机所带负载所获取的影像,影像质量的好坏从根本上来讲取决于无人机负载即相机的质量好坏。而在竖井环境中,负载最佳选择为单反相机。


环境及相机补光
04
无人机检测竖井实施流程
-
飞手站位选择
在实际作业过程中,最为重要的就是飞手的飞行站位选择,一个好的选位对于飞手控制无人机有着极大的便利,随着飞手与无人机的距离加大,斜距加大,人的视线误差也会随之加大,哪怕无人机具有防撞装置也比较危险。因此在无人机对垂直竖井进行检查时,可以使用沙袋或者其他物体制作一个可站立平台保证飞手及安全员可以平稳站立,在飞行过程中无人机一般情况下不要脱离飞手的视野范围。
-
数据获取要求
飞行过程中无人机获取影像。通过无人机的图传模块,无人机安全员或者无人机第二飞手通过相机控制模块进行拍摄,录像等。无人机在同一高度通过自转进行角度的调整进行数据的获取。
-
无人机引导方法
飞行过程中无人机的位置会随着惯性水平方向发生位移,而这种偏移只能通过飞手进行位置纠正。在有防撞装置的前提下无人机在低速下与竖井内壁发生碰撞不会影响无人机的安全。在条件允许的情况下可以使用激光引导的方法对无人机的飞行路径进行激光引导,借此达到更安全更准确的无人机飞行数据获取。激光引导装置集成了水平仪、多束激光、自动防抖等功能,为无人机的安全飞行指引方向。
-
拍摄
使用无人机操控飞行,使用图传控制系统对竖井内部进行无死角的影像拍摄。
-
数据处理
通过无人机对竖井内壁进行拍摄,采用影像播放的形式,实时检查竖井内部缺陷,如下图所示,通过特征点及设计图纸高程信息判断病害位置及数量,出具检查报告。
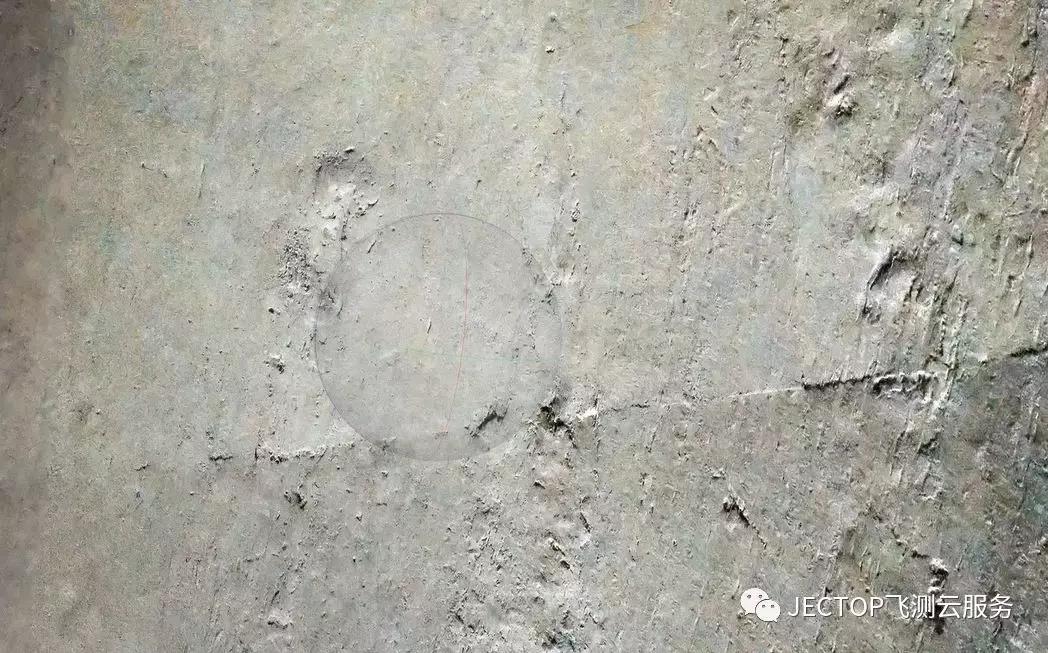

获取影像
05
结语
针对水电站垂直引水竖井数据获取与病害检测的难题,我们杰创天成采用猎鹰8无人机采集影像数据进行数字处理的方案,该方案具有速度快,准确度高,控制灵活的优点,填补了竖井检测的国内空白,具有很好的应用前景。
 用户名
用户名 密码
密码